

8亿彩票官方下载
GuanHang &Machinery
还搞不懂步进电机?一定要看这一文作业原理+驱动办法
关于步进电机,每输入一个脉冲信号,转子就滚动一个视点或行进一步。其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。因而,步进电动机又称脉冲电动机。

双极步进电机有四根电线和两个线圈。要使其旋转,一定要经过线圈发送电流。每根电线都需求能够被凹凸驱动。以下是怎么驱动电流使步进电机旋转。
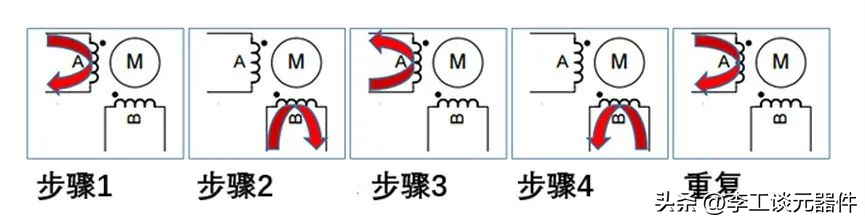
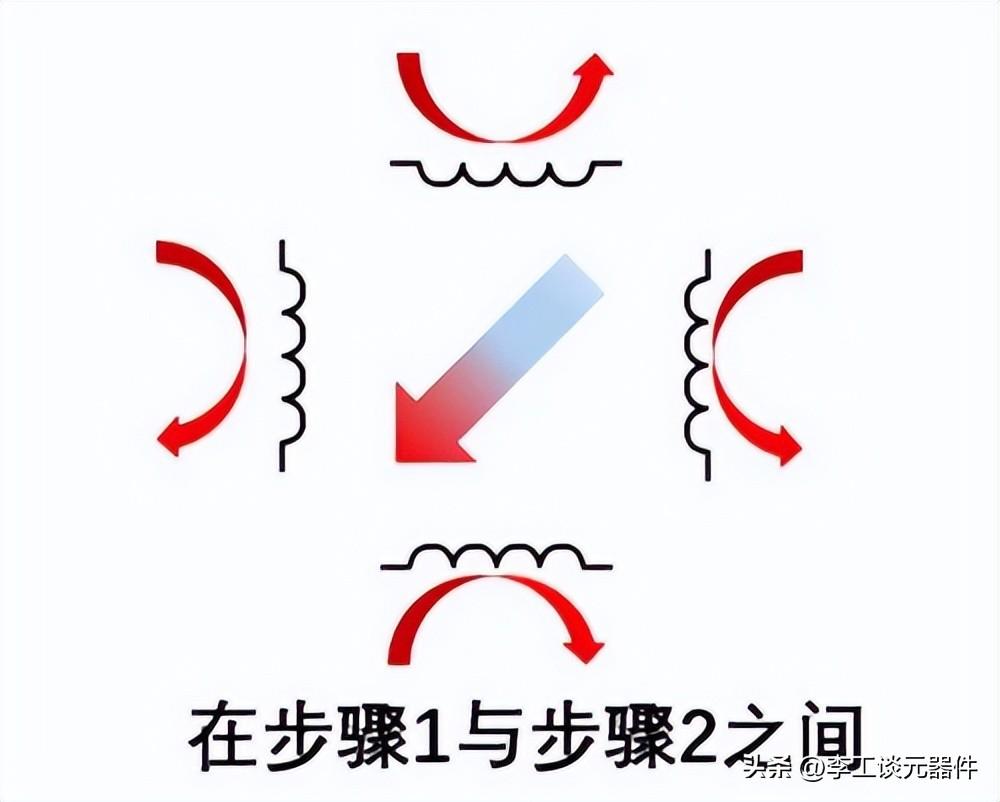
要了解为什么这样做,请考虑一个只要四个过程的简略步进电机。在榜首阶段,它将磁体与榜首线圈对齐。下一步将磁体旋转90度。经过榜首线圈反向发送电流会回转磁体极性。相反的线圈被衔接,但相关于中心磁体发生相反的磁场。

当然,大多数步进电机的步数超越4步。你的规范步进电机每转200步。以这种办法旋转电机称为全步进。一旦你完成了全步作业,半步是分外的简略的。你能够一起经过两个线圈发送电流,这将使分辨率加倍。
步进电机驱动器也能够正常的运用微步进,微步进调理经过线圈的电流。典型的电机操控器能够在每一个完好的过程中履行16个微过程。一些芯片担任调制电流,但较旧的芯片需求为其驱动的步进电机“调谐”。
微步进进一步将整个步进划分为256微步进,使典型的200步进电机变成51200步进电机!微步进还下降了电机的噪音,使其运转更平稳、更高效。
操控经过绕组的电流的最常见设置是运用所谓的H桥。它是一组四个晶体管,能够将每条导线拉高或拉低。你也能够用MOS管替代晶体管,但布线会有点不同。该图显现了怎么经过H桥向恣意方向发送电流。你只需求翻开途径中的晶体管。
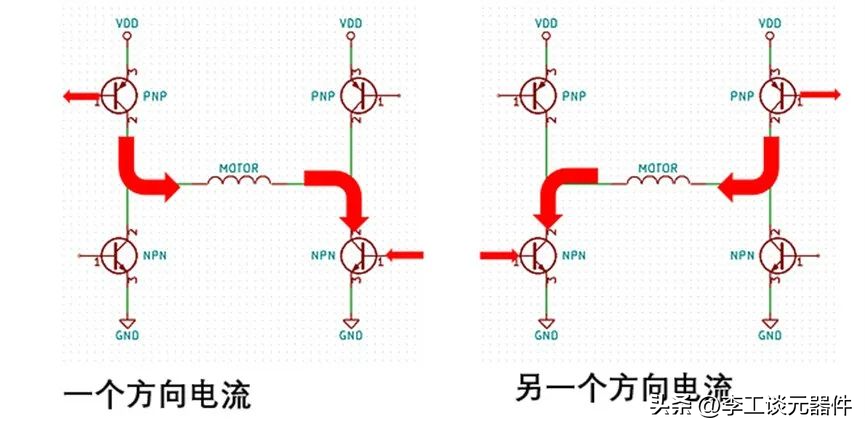
你有必要保证同一侧的两个晶体管不能一起导通。这将经过供给从电源到接地的低电阻途径使电路短路。你还应留意,晶体管在大多数情况下要一段时间才能从接通切换到断开。除非你清楚自己在做什么,否则不主张快速切换经过线圈的电流。
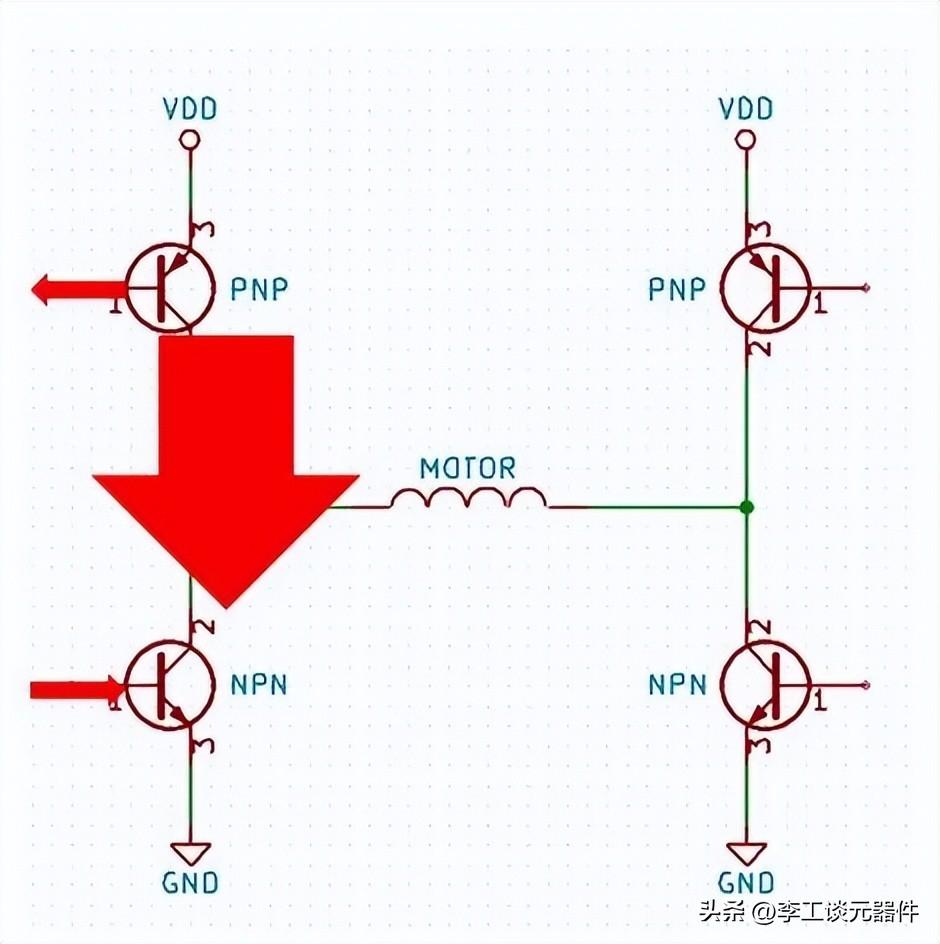
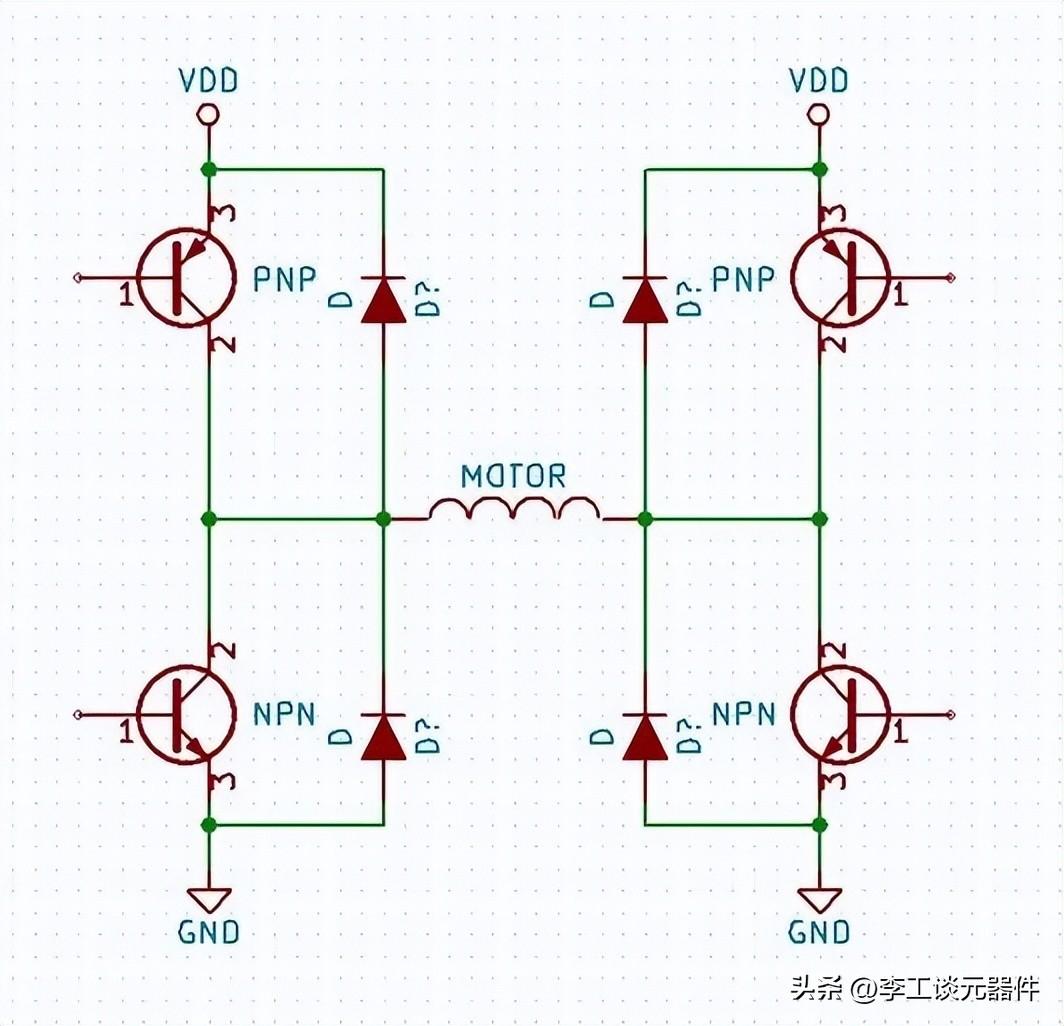
这将避免电机发生高压,这可能会损坏晶体管乃至驱动器。假如驱动步进电机的电压高于MCU输出的电压,则需求增加另一个晶体管来操控PNP晶体管。

当你翻开额定的NPN晶体管时,它将答应电流从PNP晶体管的基极(引脚1)流出,然后翻开它。现在所需求的仅仅全部NPN晶体管基极上的限流电阻。
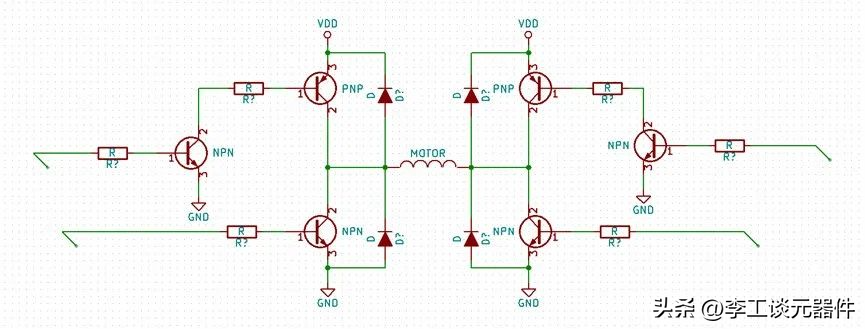
便是这样!该H桥将操控经过其间一个绕组的电流。因为有两个绕组,咱们应该将这个电路加倍。
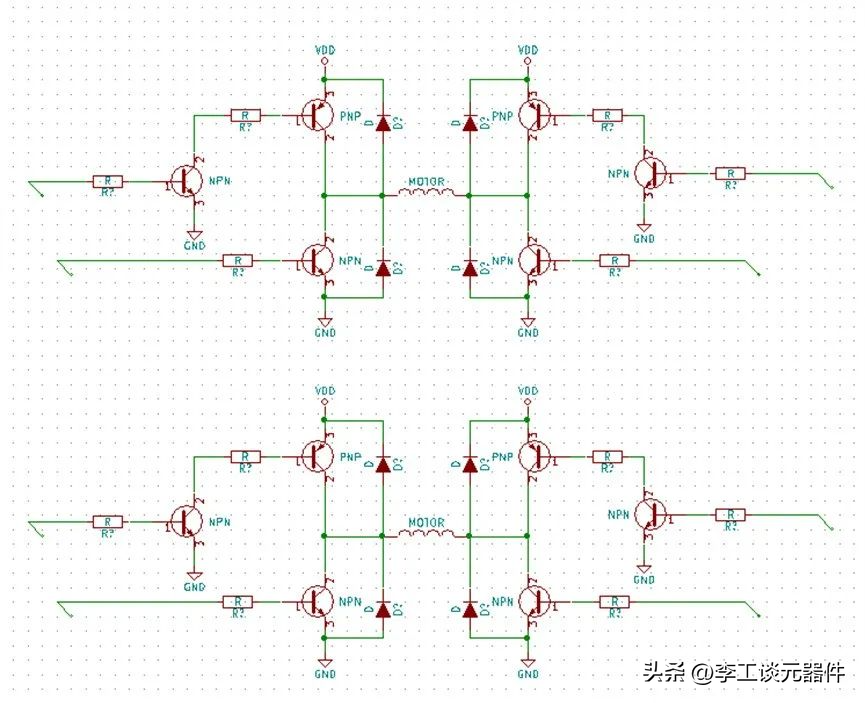
现在,你能够很好地核算所需的组件。运用双H桥并不是驱动步进电机的仅有办法。你也能买步进电机驱动器,它将内置双H桥(虽然驱动器一般运用MOS管和其他技巧)。假如你想削减BOM数量(有时取得更多功用),我主张你看看步进电机驱动器。你需求检查数据表以了解芯片供给的功用。一些芯片只供给晶体管和二极管,而其他芯片则彻底操控经过线圈的电流。
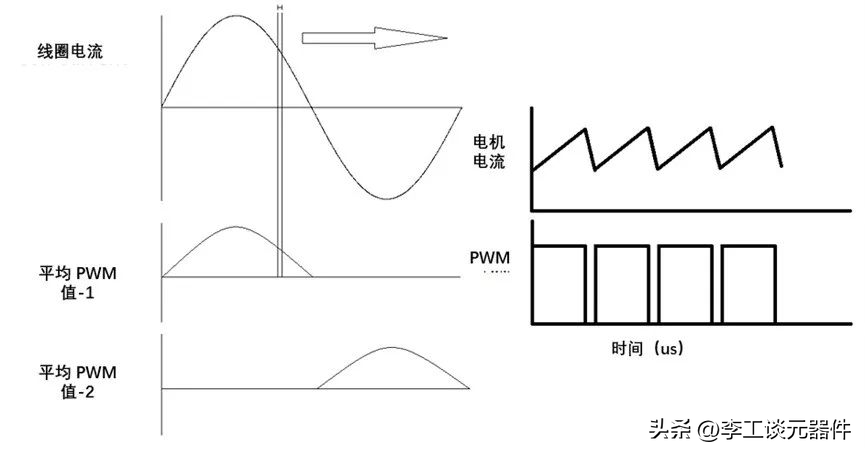
微步进包含向晶体管发送脉宽调制信号。这是一种操控电机线圈电流的简略办法。预先挑选的PWM值被放置在正弦查找表中。典型地,挑选20-40kHz的PWM频率。任何低于20千赫的声响,人类耳朵都能听到。
频率坚持低于40kHz以进步功率并削减晶体管中的功耗。当PWM信号为高时,电流流过晶体管。当PWM信号低时,电流流过二极管。这是一个十分粗糙的微步进完成,但它给出了它怎么作业的一般概念。运用MOS管的电机驱动器能操控电机电流下降或衰减的速度。驱动器的电流波形更像这样:
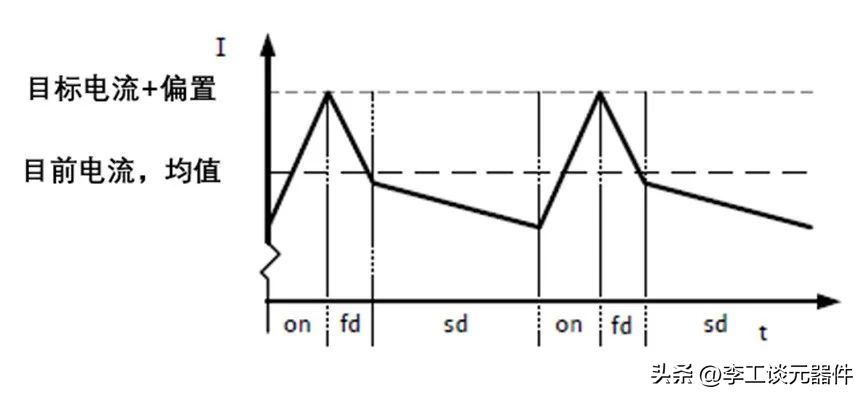
有必要为其驱动的电机手动优化快速衰减周期和慢速衰减周期。一些新芯片会依据其感应到的电流主动调整衰减周期,但旧芯片在大多数情况下要优化(或调整)。
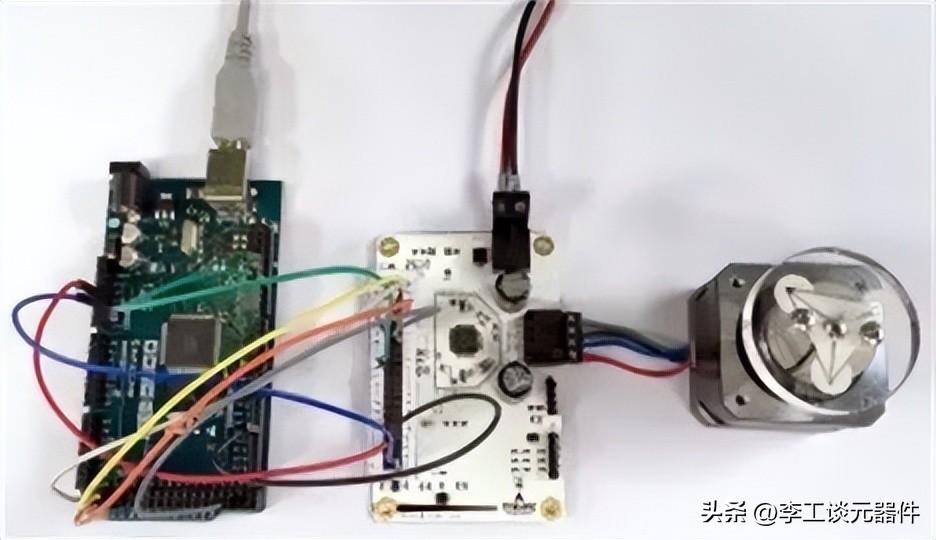
实例:运用操控板Arduino Mega操控步进电机驱动板TMC5130-EVAL来驱动步进电机。

Arduino Mega 2560是一款依据ATmega2560的微操控器板。它有54个数字输入/输出引脚(其间15个能够用作PWM输出)、16个模仿输入、4个UART(硬件串行端口)、一个16 MHz晶体振荡器、一个USB衔接、一个电源插座、一个ICSP头和一个复位按钮。
它包含支撑微操控器所需的全部;只需用USB电缆将其衔接到核算机,或用交流到直流适配器或电池为其供电即可开始运用。
TMC5130是一个彻底集成的步进电机驱动器和操控器体系,答应从任何微操控器长途操控步进电机。它在硬件上完成了全部实时要害使命。一旦装备,电机能够经过给出方针方位、指令归航序列或给出方针速度来驱动。
运用TMC5130的优点包含:易于运用,运用256微步的电机精度,低电机噪声(无噪声躲藏斩波器),无传感器失速检测(stallGuard2),无阶跃损耗,dcStep和coolStep、UART或SPI操控接口的高功率,高电压规模,小形状因数,以及低部件数量。
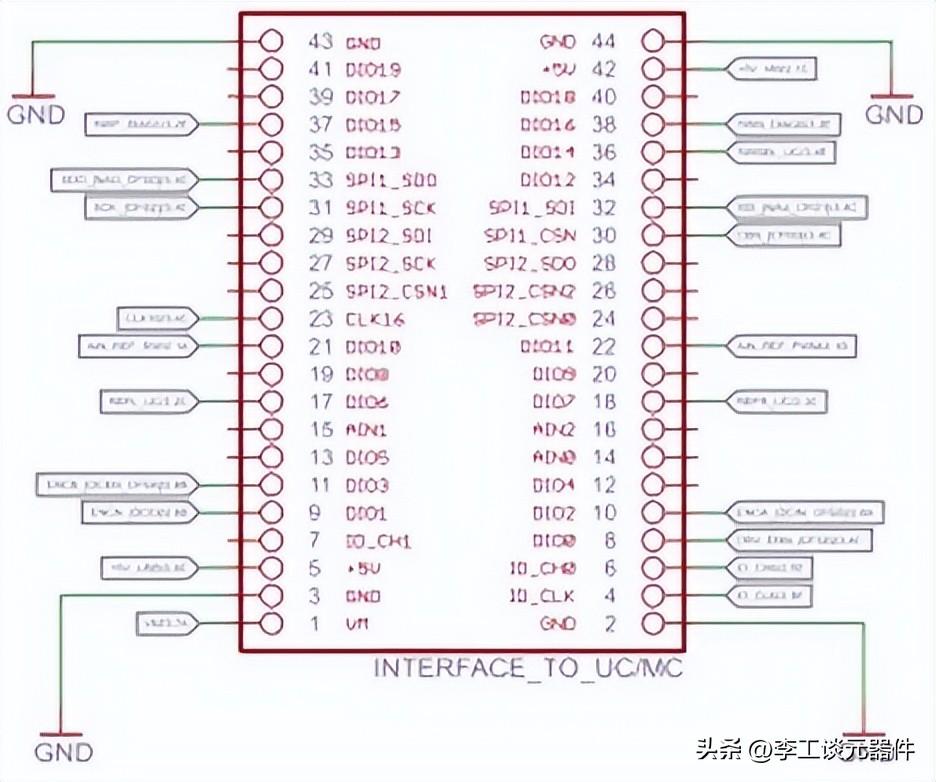
假如Arduino是5V操控板,则有必要将TMC5130-EVAL上的一个电阻从方位R3从头定位到R8。这将TMC5130的逻辑电平设置为+5V。
下面的Arduino代码不需求任何额定的库。SPI库是Arduino IDE顺便的。该程序初始化TMC5130并履行简略的移动到方位周期。它将依据步进电机的接线全步进电机向一个方向旋转10转,向另一个方向旋转10转。请运用TMC5130数据表或TMCL IDE作为不同寄存器的参阅。

